Hydraulic Robotic Gripper Tool: A Comprehensive Exploration through Simulation and Parametric Analysis
In the realm of robotics industries, hydraulic grippers stand out as indispensable tools, offering unparalleled efficiency in tasks that surpass the capabilities of conventional clamps. Their ability to precisely replicate tasks ensures consistency and elevates production quality. Hydraulic grippers find applications across diverse domains, each equipped with specific tools tailored for optimal performance in their respective fields.

This thesis embarks on a comprehensive exploration into the design and functionality of a hydraulic robotic gripping tool, specifically engineered for the nuanced demands of picking and placing various cylindrical workpieces in robotic industries. The report commences with a theoretical examination, comparing lifting and gripping techniques to discern the most suitable approach for handling diverse parts during the picking and placing processes.
The design of the robotic hydraulic gripping tool prioritizes lightweight materials such as aluminum, ensuring agility and efficiency. Rigorous testing ensues, evaluating the tool’s performance across a spectrum of materials for picking and releasing different cylindrical parts. Impressively, the robotic gripper tool demonstrates a handling capacity of 60,000 N and a remarkable reach of 3.5 meters.
However, challenges in the robotic gripper tool’s functionality surface due to potential failures stemming from design errors, assembly discrepancies, raw material deficiencies, maintenance lapses, fluctuating loading through links, wear, and noise. Of particular concern is the vulnerability to shear failure during operational scenarios. The primary objective, therefore, revolves around mitigating shear failure risks.
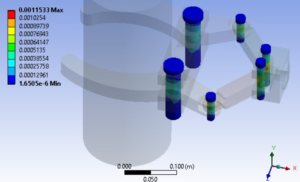
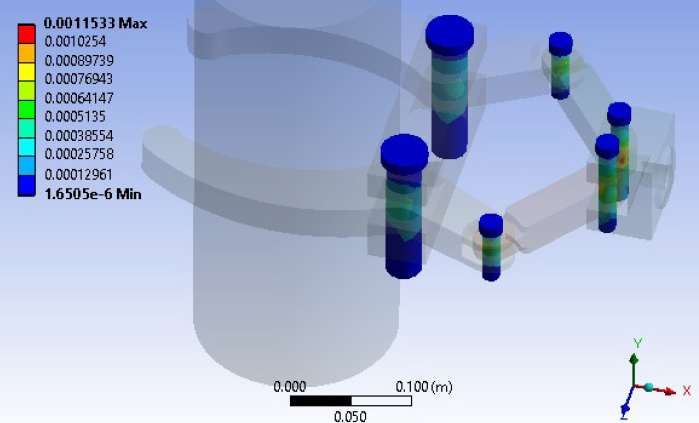
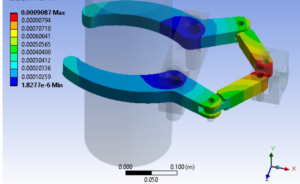
The design and modeling of the robotic gripper tool are meticulously executed using CATIA software, providing a robust foundation for subsequent analyses. Static and dynamic analyses, crucial for understanding the tool’s behavior under various conditions, are carried out using ANSYS software. The results of this analysis, presented in the comparison study for different materials used, form a pivotal component of the research.
The comparative study not only sheds light on the performance of the robotic gripper tool under diverse material conditions but also aids in identifying the optimal material to counteract shear failure. This empirical approach enhances the tool’s reliability and longevity, critical factors in the demanding landscape of robotics industries.
In conclusion, this comprehensive exploration into the hydraulic robotic gripping tool illuminates its multifaceted design considerations, material performance, and resilience in the face of potential failures. The integration of advanced software tools for design and analysis underscores the commitment to precision and efficiency. As the industry strives for advancements in robotics, this research serves as a valuable contribution, offering insights and solutions for enhancing the operational integrity of hydraulic grippers in diverse industrial applications.